|
DD4hep
1.37.0
Detector Description Toolkit for High Energy Physics
|
|
DD4hep
1.37.0
Detector Description Toolkit for High Energy Physics
|
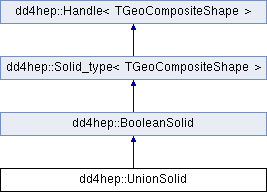
Class describing boolean union solid. More...
#include <Shapes.h>
Public Member Functions | |
| UnionSolid ()=default | |
| Default constructor. More... | |
| UnionSolid (UnionSolid &&e)=default | |
| Move Constructor. More... | |
| UnionSolid (const UnionSolid &e)=default | |
| Copy Constructor. More... | |
| template<typename Q > | |
| UnionSolid (const Handle< Q > &e) | |
| Constructor to be used when passing an already created object. More... | |
| UnionSolid (const Solid &shape1, const Solid &shape2) | |
| Constructor to create a new object. Position is identity, Rotation is identity-rotation! More... | |
| UnionSolid (const Solid &shape1, const Solid &shape2, const Position &pos) | |
| Constructor to create a new object. Placement by position, Rotation is identity-rotation! More... | |
| UnionSolid (const Solid &shape1, const Solid &shape2, const RotationZYX &rot) | |
| Constructor to create a new object. Placement by a RotationZYX within the mother. More... | |
| UnionSolid (const Solid &shape1, const Solid &shape2, const Rotation3D &rot) | |
| Constructor to create a new object. Placement by a generic rotoation within the mother. More... | |
| UnionSolid (const Solid &shape1, const Solid &shape2, const Transform3D &pos) | |
| Constructor to create a new object. Placement by a generic transformation within the mother. More... | |
| UnionSolid (const std::string &name, const Solid &shape1, const Solid &shape2) | |
| Constructor to create a new identified object. Position is identity, Rotation is identity-rotation! More... | |
| UnionSolid (const std::string &name, const Solid &shape1, const Solid &shape2, const Position &pos) | |
| Constructor to create a new identified object. Placement by position, Rotation is identity-rotation! More... | |
| UnionSolid (const std::string &name, const Solid &shape1, const Solid &shape2, const RotationZYX &rot) | |
| Constructor to create a new identified object. Placement by a RotationZYX within the mother. More... | |
| UnionSolid (const std::string &name, const Solid &shape1, const Solid &shape2, const Rotation3D &rot) | |
| Constructor to create a new identified object. Placement by a generic rotoation within the mother. More... | |
| UnionSolid (const std::string &name, const Solid &shape1, const Solid &shape2, const Transform3D &pos) | |
| Constructor to create a new identified object. Placement by a generic transformation within the mother. More... | |
| UnionSolid & | operator= (UnionSolid &©)=default |
| Move Assignment operator. More... | |
| UnionSolid & | operator= (const UnionSolid ©)=default |
| Copy Assignment operator. More... | |
 Public Member Functions inherited from dd4hep::BooleanSolid Public Member Functions inherited from dd4hep::BooleanSolid | |
| BooleanSolid ()=default | |
| Default constructor. More... | |
| BooleanSolid (BooleanSolid &&b)=default | |
| Move Constructor. More... | |
| BooleanSolid (const BooleanSolid &b)=default | |
| Copy Constructor. More... | |
| template<typename Q > | |
| BooleanSolid (const Handle< Q > &e) | |
| Constructor to be used when passing an already created object. More... | |
| BooleanSolid & | operator= (BooleanSolid &©)=default |
| Move Assignment operator. More... | |
| BooleanSolid & | operator= (const BooleanSolid ©)=default |
| Copy Assignment operator. More... | |
| Solid | rightShape () const |
| Access right solid of the boolean. More... | |
| Solid | leftShape () const |
| Access left solid of the boolean. More... | |
| const TGeoMatrix * | rightMatrix () const |
| Access right positioning matrix of the boolean. More... | |
| const TGeoMatrix * | leftMatrix () const |
| Access left positioning matrix of the boolean. More... | |
| Public Member Functions inherited from dd4hep::Solid_type< TGeoCompositeShape > | |
| Solid_type ()=default | |
| Default constructor for uninitialized object. More... | |
| Solid_type (Solid_type &&e)=default | |
| Move constructor. More... | |
| Solid_type (const Solid_type &e)=default | |
| Copy constructor. More... | |
| Solid_type (TGeoCompositeShape *p) | |
| Direct assignment using the implementation pointer. More... | |
| Solid_type (Handle< TGeoCompositeShape > &&e) | |
| Move Constructor from handle. More... | |
| Solid_type (const Handle< TGeoCompositeShape > &e) | |
| Copy Constructor from handle. More... | |
| Solid_type (const Handle< Q > &e) | |
| Constructor to be used when passing an already created object: need to check pointers. More... | |
| Solid_type & | operator= (Solid_type &©)=default |
| Assignment move operator. More... | |
| Solid_type & | operator= (const Solid_type ©)=default |
| Assignment copy operator. More... | |
| const char * | name () const |
| Access to shape name. More... | |
| Solid_type< TGeoCompositeShape > & | setName (const char *value) |
| Set new shape name. More... | |
| Solid_type< TGeoCompositeShape > & | setName (const std::string &value) |
| Set new shape name. More... | |
| const char * | title () const |
| Access to shape title (GetTitle accessor of the TGeoShape) More... | |
| const char * | type () const |
| Access to shape type (The TClass name of the ROOT implementation) More... | |
| operator TGeoCompositeShape * () const | |
| Auto conversion to underlying ROOT object. More... | |
| TGeoCompositeShape * | operator-> () const |
| Overloaded operator -> to access underlying object. More... | |
| std::vector< double > | dimensions () |
| Access the dimensions of the shape: inverse of the setDimensions member function. More... | |
| Solid_type & | setDimensions (const std::vector< double > ¶ms) |
| Set the shape dimensions. As for the TGeo shape, but angles in rad rather than degrees. More... | |
| std::string | toString (int precision=2) const |
| Conversion to string for pretty print. More... | |
| TGeoVolume * | divide (const Volume &voldiv, const std::string &divname, int iaxis, int ndiv, double start, double step) const |
| Divide volume into subsections (See the ROOT manuloa for details) More... | |
| Public Member Functions inherited from dd4hep::Handle< TGeoCompositeShape > | |
| Handle ()=default | |
| Default constructor. More... | |
| Handle (Handle< TGeoCompositeShape > &&element)=default | |
| Copy constructor. More... | |
| Handle (const Handle< TGeoCompositeShape > &element)=default | |
| Copy constructor. More... | |
| Handle (TGeoCompositeShape *element) | |
| Initializing constructor from pointer. More... | |
| Handle (Q *element) | |
| Initializing constructor from unrelated pointer with type checking. More... | |
| Handle (const Handle< Q > &element) | |
| Initializing constructor from unrelated handle with type checking. More... | |
| Handle< TGeoCompositeShape > & | operator= (Handle< TGeoCompositeShape > &&element)=default |
| Assignment move operator. More... | |
| Handle< TGeoCompositeShape > & | operator= (const Handle< TGeoCompositeShape > &element)=default |
| Assignment copy operator. More... | |
| bool | operator== (const Handle< TGeoCompositeShape > &element) const |
| Boolean operator == used for RB tree insertions. More... | |
| bool | operator< (const Handle< TGeoCompositeShape > &element) const |
| Boolean operator < used for RB tree insertions. More... | |
| bool | operator> (const Handle< TGeoCompositeShape > &element) const |
| Boolean operator > used for RB tree insertions. More... | |
| bool | isValid () const |
| Check the validity of the object held by the handle. More... | |
| bool | operator! () const |
| Check the validity of the object held by the handle. More... | |
| Handle< TGeoCompositeShape > & | clear () |
| Release the object held by the handle. More... | |
| TGeoCompositeShape * | operator-> () const |
| Access the held object using the -> operator. More... | |
| operator TGeoCompositeShape & () const | |
| Automatic type conversion to an object references. More... | |
| TGeoCompositeShape & | operator* () const |
| Access the held object using the * operator. More... | |
| TGeoCompositeShape * | ptr () const |
| Access to the held object. More... | |
| Q * | _ptr () const |
| Access to an unrelated object type. More... | |
| Q * | data () const |
| Access to an unrelated object type. More... | |
| Q & | object () const |
| Access to an unrelated object type. More... | |
| TGeoCompositeShape * | access () const |
| Checked object access. Throws invalid handle runtime exception if invalid handle. More... | |
| const char * | name () const |
| Access the object name (or "" if not supported by the object) More... | |
| const char * | name () const |
| const char * | name () const |
| void | assign (Object *n, const std::string &nam, const std::string &title) |
| Assign a new named object. Note: object references must be managed by the user. More... | |
| void | assign (_Segmentation *s, const std::string &n, const std::string &) |
| void | assign (NamedObject *p, const std::string &n, const std::string &t) |
| void | destroy () |
| Destroy the underlying object (be careful here: things are not reference counted)! More... | |
Additional Inherited Members | |
| Public Types inherited from dd4hep::Handle< TGeoCompositeShape > | |
| typedef TGeoCompositeShape | Object |
| Extern accessible definition of the contained element type. More... | |
| typedef Handle< TGeoCompositeShape > | Base |
| Self type: used by sub-classes. More... | |
| Static Public Member Functions inherited from dd4hep::Handle< TGeoCompositeShape > | |
| static void | bad_assignment (const std::type_info &from, const std::type_info &to) |
| Helper routine called when unrelated types are assigned. More... | |
| Public Attributes inherited from dd4hep::Handle< TGeoCompositeShape > | |
| TGeoCompositeShape * | m_element |
| Single and only data member: Reference to the actual element. More... | |
| Protected Member Functions inherited from dd4hep::Solid_type< TGeoCompositeShape > | |
| void | _setDimensions (double *param) const |
| void | _assign (TGeoCompositeShape *n, const std::string &nam, const std::string &tit, bool cbbox) |
| Assign pointrs and register solid to geometry. More... | |
Class describing boolean union solid.
For any further documentation please see the following ROOT documentation:
|
default |
Default constructor.
|
default |
Move Constructor.
|
default |
Copy Constructor.
|
inline |
Constructor to create a new object. Position is identity, Rotation is identity-rotation!
Constructor to be used when creating a new object. Position is identity, Rotation is identity rotation.
Definition at line 931 of file Shapes.cpp.
Constructor to create a new object. Placement by position, Rotation is identity-rotation!
Constructor to be used when creating a new object. Rotation is identity rotation.
Definition at line 943 of file Shapes.cpp.
| UnionSolid::UnionSolid | ( | const Solid & | shape1, |
| const Solid & | shape2, | ||
| const RotationZYX & | rot | ||
| ) |
Constructor to create a new object. Placement by a RotationZYX within the mother.
Constructor to be used when creating a new object.
Definition at line 949 of file Shapes.cpp.
| UnionSolid::UnionSolid | ( | const Solid & | shape1, |
| const Solid & | shape2, | ||
| const Rotation3D & | rot | ||
| ) |
Constructor to create a new object. Placement by a generic rotoation within the mother.
Constructor to be used when creating a new object.
Definition at line 955 of file Shapes.cpp.
| UnionSolid::UnionSolid | ( | const Solid & | shape1, |
| const Solid & | shape2, | ||
| const Transform3D & | pos | ||
| ) |
Constructor to create a new object. Placement by a generic transformation within the mother.
Constructor to be used when creating a new object. Placement by a generic transformation within the mother.
Definition at line 937 of file Shapes.cpp.
Constructor to create a new identified object. Position is identity, Rotation is identity-rotation!
Constructor to be used when creating a new object. Position is identity, Rotation is identity rotation.
Definition at line 961 of file Shapes.cpp.
| UnionSolid::UnionSolid | ( | const std::string & | name, |
| const Solid & | shape1, | ||
| const Solid & | shape2, | ||
| const Position & | pos | ||
| ) |
Constructor to create a new identified object. Placement by position, Rotation is identity-rotation!
Constructor to be used when creating a new object. Rotation is identity rotation.
Definition at line 973 of file Shapes.cpp.
| UnionSolid::UnionSolid | ( | const std::string & | name, |
| const Solid & | shape1, | ||
| const Solid & | shape2, | ||
| const RotationZYX & | rot | ||
| ) |
Constructor to create a new identified object. Placement by a RotationZYX within the mother.
Constructor to be used when creating a new object.
Definition at line 979 of file Shapes.cpp.
| UnionSolid::UnionSolid | ( | const std::string & | name, |
| const Solid & | shape1, | ||
| const Solid & | shape2, | ||
| const Rotation3D & | rot | ||
| ) |
Constructor to create a new identified object. Placement by a generic rotoation within the mother.
Constructor to be used when creating a new object.
Definition at line 985 of file Shapes.cpp.
| UnionSolid::UnionSolid | ( | const std::string & | name, |
| const Solid & | shape1, | ||
| const Solid & | shape2, | ||
| const Transform3D & | pos | ||
| ) |
Constructor to create a new identified object. Placement by a generic transformation within the mother.
Constructor to be used when creating a new object. Placement by a generic transformation within the mother.
Definition at line 967 of file Shapes.cpp.
|
default |
Copy Assignment operator.
|
default |
Move Assignment operator.
 1.8.18
1.8.18